Diseño de una smart grid para un sistema híbrido de energía
RESUMEN
Este documento expone el diseño de una red eléctrica inteligente (Smart Grid) para un sistema hibrido de energía haciendo uso de una técnica inteligente de control denominada lógica difusa. Las fuentes para el sistema están compuestas por un sistema fotovoltaico, un acumulador eléctrico o baterías, y la red eléctrica convencional. Este sistema es soportado por una regla de comparación en niveles de energía (lógica difusa), cuya fuente prioritaria para el suministro de corriente eléctrica proviene de diferentes módulos fotovoltaicos. Cuando la energía suministrada por el sistema resulta ser insuficiente para alimentar una carga mínima de 300 Watts, este operará de forma autónoma para seleccionar las baterías como fuente de energía; las cuales han sido cargadas por medio del sistema de arreglo de paneles solares. Como última opción se realizará la conmutación del sistema a la red eléctrica, siempre y cuando se compruebe que las anteriores fuentes no son capaces de ofrecer la necesidad de energía que requiere la carga, de esta forma se provee energía continuamente, sin interrupciones. Para el acondicionamiento de las señales obtenidas a partir del sistema fotovoltaico y de las baterías, se desarrolló un inversor DC-AC utilizando estrategias PWM como mecanismo de conversión y utilizando Mosfets de potencia como dispositivos para la conmutación controlada del inversor.
Palabras clave: Solar, Hibrido, Lógica Difusa, Inversor, Control, Red Eléctrica Inteligente.
1. INTRODUCCIÓN
Los sistemas de almacenamiento de energía distribuida en combinación con la electrónica de potencia avanzada tienen un gran papel técnico que desempeñar y tendrá un gran impacto en los futuros sistemas de suministro eléctrico y conducirá a muchos beneficios financieros. Hasta ahora, cuando los sistemas de almacenamiento de energía están integrados en redes eléctricas convencionales, topologías de sistemas especiales y/o de control requieren ser diseñados para casi cada caso particular. Esto conlleva un diseño costoso y depuración de cada componente del sistema o de control individual cada vez que se decide añadir un sistema de almacenamiento de energía. No obstante, los dispositivos de almacenamiento, arquitecturas estandarizadas y técnicas para la inteligencia distribuida y sistemas de energía inteligentes, así como herramientas y modelos para ayudar a la integración de los sistemas de almacenamiento de energía de planificación se utilizan cada vez más. [1]
Una red inteligente se puede definir como una infraestructura de red de energía eléctrica moderna para mejorar la eficiencia, la fiabilidad y la seguridad, con la integración de fuentes de energía renovables y alternativas, a través de tecnologías modernas de comunicación y de control automatizado. El aumento de la necesidad de un control más eficaz de los sistemas eléctricos de potencia, ha causado que el desarrollo de las redes inteligentes se convierta el principal objeto de estudio de muchos investigadores.
Algunos trabajos se proponen sistemas digitales para el monitoreo de condición, el diagnóstico y el control de supervisión aplicados a las redes inteligentes, sistemas que se basan en la arquitectura de red híbrida, que consiste en una infraestructura cableada, una red de sensores inalámbricos y comunicaciones por línea eléctrica (con tres topologías de hardware responsables de la adquisición de la señal, el procesamiento y la transmisión) [2]. Se han propuesto redes inteligentes basadas en redes de corriente alterna CA, Sin embargo, pocos son los trabajos presentados o publicados en una red inteligente basada en una red de corriente continua CC. Así, algunos de estos presentan sistemas de energía inteligente CA/CC híbrido, sistemas con ventajas tanto de CC y redes de CA, que consisten en generadores de viento y varias cargas controlables (con capacidades diferentes). Mediante la aplicación de control de consumo de energía con la característica de caída, la tensión del bus de CC se mantiene dentro del rango aceptable.
Como las cargas son controlables, se simulan calentadores de agua y vehículos eléctricos. [3]
El presente artículo muestra el marco teórico del proyecto desarrollado, donde se expone los elementos y métodos de control objeto de la investigación. De igual forma en un tercer apartado se presenta la metodología, explicando en profundidad las variables y métodos implementados para dar lugar a los resultados, que son desplegados en la siguiente sección. Por ultimo de finaliza el documento con las conclusiones producto del trabajo investigativo.
2. MARCO TEÓRICO
Los sistemas fotovoltaicos están conformados básicamente por un panel solar o un arreglo de los mismos, una batería, un regulador de carga para la batería y en caso que se requiera corriente alterna un inversor de DC/AC.
Los inversores DC/CA son dispositivos que cumplen con la función de adaptar las señales eléctricas a las condiciones requeridas para lograr la inyección de energía, estos dispositivos son de gran utilidad en los automóviles en aplicaciones tales como carga de celulares, instalación de plantas de sonido y video, y otros aparatos los cuales trabajan con corriente alterna [4][5]. Para el diseño de un inversor se deben tener en cuenta aspectos muy importantes como: la potencia, la frecuencia y los diferentes dispositivos con los cuales estará conformado. Existen dos tipos de inversores monofásicos y trifásicos, que para su diseño se puede utilizar dispositivos con activación controlada como BJT, MOSFET, IGBT, MCT, SIT, GTO.
El sistema a implementar consiste en la selección autónoma de fuentes (solar fotovoltaica, sistema de energía almacenada y red eléctrica convencional) para el suministro ininterrumpido de energía eléctrica. Para lograr esto se utilizó un controlador basado en lógica difusa (Fuzzy Logic).
La lógica difusa ha surgido como una herramienta importante para el control de subsistemas y procesos industriales complejos, así como también para la electrónica de entretenimiento y hogar, sistemas de diagnóstico y otros sistemas expertos [6]. En esencia un controlador lógico difuso, contiene un algoritmo que es capaz de convertir una estrategia de control lingüística en una estrategia de control automático. Con la lógica difusa se pueden diseñar aplicaciones que logren que las máquinas respondan con mayor inteligencia a la imprecisión y a las condiciones del mundo exterior, con lo que se busca imitar el razonamiento humano.
Inversor con Transformador de Toma Media “Push-Pull”
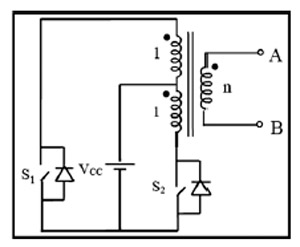
La topología “push- pull” observada en la Fig. 1, necesita dos señales de control, de forma que el gobierno de ambos conmutadores se realiza alternativamente, reseteándose el transformador de forma automática al final de cada periodo de conducción, las señales aplicadas a los transistores deben de ser exactamente simétricas, ya que de lo contrario el núcleo se llevaría a saturación [7]. El conversor consta de una configuración muy similar a la de un rectificador de medio puente, cuando se activa el pulsador S1 la corriente gira en sentido contrario a las manecillas del reloj a través de la primera derivación, generando un pulso positivo en la salida del transformador (devanado secundario). Cuando se activa S2 la corriente cambia de sentido y de esta manera se invierte el pulso de salida.
Figura 1. Esquema de un inversor con transformador de toma media [8].
 |
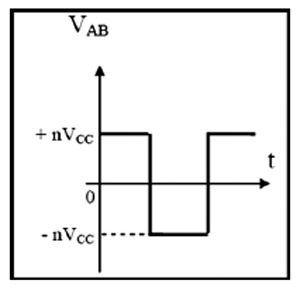
En la Figura 2 se puede ver la señal de salida de un inversor con transformador de toma media. Para esta topología debemos tener en cuenta la relación del número de espiras del primario y secundario, ya que esta define como tal, el valor de la tensión en la salida. El devanado primario tiene una división o derivación central, para que la amplitud del pulso positivo sea igual a la magnitud del pulso negativo, esta división del devanado primario debe ser simétrica.
Figura 2. Voltaje de salida para un inversor (push-pull) [8].
 |
Para esta configuración es necesario añadir diodos en antiparalelo con los transistores de potencia, para permitir la circulación de corriente de la carga cuando todos los transistores están abiertos. Si no se añaden diodos, se crean grandes sobretensiones debido al corte instantáneo de la corriente por la inductancia de la carga, con lo que acaba destruyéndose el convertidor de potencia.
La modulación por ancho de pulso optimizada aparece como resultado del creciente desarrollo en la tecnología de microprocesadores, que ha facilitado la realización a estas estrategias [9]. La modulación se caracteriza por utilizar un tren de pulsos por semiperíodo, tal que al variar el ancho de los mismos, disminuye el contenido de armónicos relativo de la onda de salida [10].
Sistema de lógica difusa
La lógica difusa aplica la lógica multivariada a la teoría de conjuntos, estableciendo la posibilidad de que los elementos pudieran tener diferentes grados de pertenencia a un conjunto, de esta forma se desarrolló un algebra completa para los conjuntos difusos [11]. La lógica difusa se utiliza cuando la complejidad del proceso en cuestión es muy alta y no existen modelos matemáticos precisos, para procesos altamente no lineales, y cuando se manejan definiciones y conocimiento no estrictamente definido [12]. Los sistemas de inferencia basados en lógica difusa se utilizan en multitud de aplicaciones entre las que cabe citar los sistemas expertos (como sistemas de análisis financiero, de diagnóstico médico o de toma de decisiones), el reconocimiento de patrones (con múltiples aplicaciones en visión artificial y reconocimiento de voz, entre otras) o los sistemas de control (como sistemas de navegación de vehículos y de robots y todo tipo de controladores industriales). [13] Los conjuntos difusos suministran una ayuda para solucionar problemas imprecisos. La variable lingüística resulta ser una herramienta eficaz para encausar lenguaje natural, que es impreciso y difuso, estas son análogas a las numéricas ya que poseen valores que son asociados a ellas. Pero, se diferencian en que los valores de las variables lingüísticas no son números sino expresiones del lenguaje que representan alguno monto abstracto. Estas expresiones del lenguaje son los nombres de conjuntos difusos que consisten de valores numéricos.
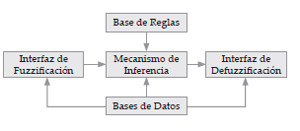
La estructura de un sistema de lógica difusa (Figura 3) para un controlador está conformada por: una interfaz de fuzzificación, que se encarga de convertir los datos de entrada del controlador (un valor crisp) a valores que puedan ser utilizados en el proceso de razonamiento difuso, un mecanismo de inferencia encargado de realizar el proceso de razonamiento (estimar la salida en función de la entrada), este mecanismo se encuentra compuesto por una base de datos, que contiene la definición lingüística de las variables, y una base de reglas la cual posee el conjunto de acciones a realizar dependientes del estado de las variables de entrada. Por último se encuentra la interfaz de defuzzificación, esta interfaz convierte la salida difusa a una acción precisa que establece la salida total.
Figura 3. Diagrama en bloques de un sistema de lógica difusa.
 |
En función del tipo de regla difusa que se utilicen se pueden distinguir principalmente dos tipos:
– Tipo Mamdani [1975]
– Tipo TSK (Takagi, Sugeno y Kang) [1985, 1988]
Para el sistema de inferencia Mamdani se tiene dos enfoques principales: el enfoque FATI (fírst aggregate, then inferencé), donde se aplica el operador de implicación con la entrada dada a cada una de las reglas y obtiene su correspondiente conjunto difuso de salida, para luego agregar los conjuntos difusos de salida obtenidos para construir una única salida, reduciendo el conjunto difuso agregado resultante a un valor característico (número crisp). El enfoque FITA (fírst inferencé, then aggregate), que aplica el operador de implicación con la entrada dada a cada regla para obtener el conjunto difuso de salida y reducir éste a un valor característico (número crisp), y a continuación, agregar estos valores (por ejemplo, mediante la media ponderada por el grado de emparejamiento) [14,15,16,17].
La topología que se utilizó para definir los conjuntos difusos es la correspondiente a la triangular, debido a que esta ofrece una respuesta lineal con mayor grado de selectividad, es sencilla de representar cualquier lenguaje de programación (en este caso el del software CCS), y puede definir un grado de incertidumbre frente a un solo dato del estado que se desee.
3. METODOLOGÍA
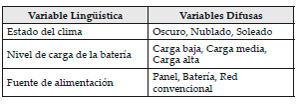
Como se mencionó anteriormente el mecanismo de inferencia está conformado por la base de datos y un conjunto de reglas, que son las que determinan la acción de control en el sistema. La base de datos está compuesta de variables de estado y proceso, en nuestro controlador las variables de entrada o de estado fueron definidas como: El Clima y Nivel de Carga en la Batería y la variable de proceso o salida será la Fuente de Alimentación. Para ello se define el conjunto difuso a partir de las variables expuestas en la Tabla 1.
Tabla 1. Variables de estado del sistema.
 |
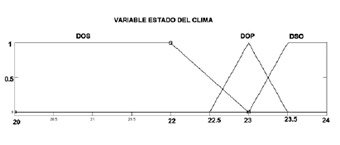
Para la variable lingüística Estado del Clima tenemos un universo de discurso que va desde 20 hasta 24 voltios. Este rango fue elegido ya que con un voltaje menor a los 20 voltios, el panel no tendría la energía suficiente para alimentar el inversor y suministrar carga a la batería. El diagrama de los conjuntos difusos para la variable estado del clima se muestra en la Figura 4, donde los siglas Dos, Dop y Dso, hacen referencia a las etiquetas de los conjuntos difusos Día Oscuro, Día Opaco y Día Soleado respectivamente.
Figura 4. Funciones de membrecía para la variable estado del clima.
 |
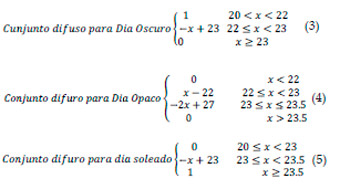
Para obtener el comportamiento de las distintas variables es necesario obtener el modelo matemático que representa cada conjunto de las variables del sistema denotadas por rangos dentro del universo de discurso, para obtener el modelo se utiliza la ecuación de la recta
 |
Aplicando esto a cada uno de los conjuntos se obtienen las ecuaciones para los diferentes conjuntos.
 |
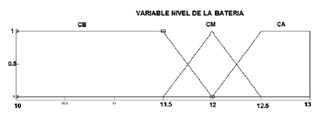
Para la variable lingüística nivel de carga de la batería él universo de discurso se encuentra entre 10 y 13, rango definido según el comportamiento de la batería frente al inversor y su nivel máximo de carga.
Los acrónimos CB, CN y CA que aparecen en la Figura 5. Hacen referencia a las etiquetas de los conjuntos difusos Carga Baja, Carga Normal y Carga Alta respectivamente.
Figura 5. Funciones de membrecía para la variable nivel de la batería.
 |
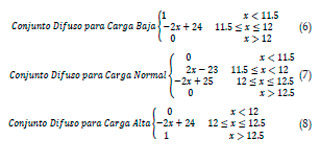
Así, los conjuntos difusis se definen como:
 |
La variable de salida es de tipo Singleton debido a que vamos a seleccionar la fuente entre panel, batería y red eléctrica. Estas salidas están representadas mediante valores discretos, en la Figura 6 se muestran los tres conjuntos difusos.
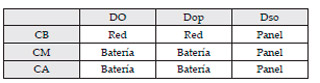
Una vez definida la base de datos el paso a seguir es generar la base de reglas para el controlador difuso. Estas reglas fueron generadas a partir del conocimiento que se tiene con respecto al inversor y comportamiento de las fuentes de alimentación, y se muestran en la tabla 2.
Figura 6. Funciones de membresía para la variable de salida fuente alimentación
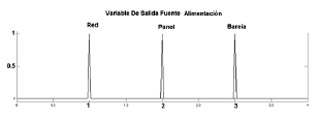 |
Tabla 2. Base de reglas del controlador difuso.
 |
Diseño del Inversor
El método directo se clasifica dentro de la modulación PWM optimizada. Este método se denomina directo, ya que no utiliza la señal portadora para la obtención de la onda PWM de salida. Este método consiste en igualar la energía de la señal que se quiere con la señal modulada.
La señal sinusoidal deseada está representada por:
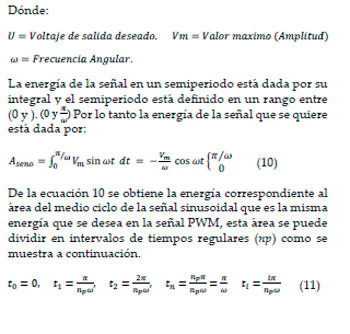 |
 |
4. RESULTADOS
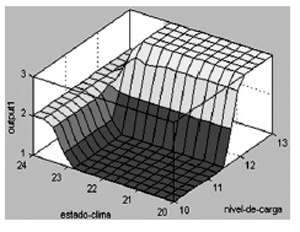
La herramienta de simulación Matlab en la toolbox fuzzy ofrece la opción de simular el controlador por el método mamdani o por Takagi-Sugeno-Kang (TSK). Para este caso se hizo la simulación por los dos métodos comparando su respuesta y posteriormente escogiendo el método implementado en el sistema.
Figura 8. Respuesta del controlador con la técnica Mamdani.
 |
Los resultados obtenidos con las dos técnicas se muestran en la tabla 3, donde la entrada al controlador fue la misma para ambos casos.
Tabla 3. Resultados de simulación y comparación de técnicas
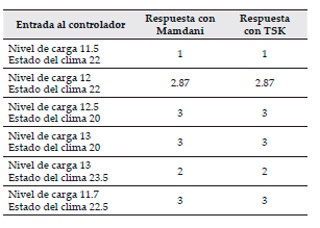 |
El método que se desarrollo en este trabajo para la implementación del controlador es el de Mamdani ya que este método nos proporciona una forma genérica para su diseño y no se tiene que buscar una ecuación a la salida que se adapte a la respuesta que se requiera.
Una vez definido el mecanismo de inferencia (máximomínimo), el enfoque implementado fue FITA (First Aggregate, Then inference) ya que este ofrece un menor costo computacional. Y el método de desfuzzyficacion empleado fue Centro de gravedad, de esta forma se obtiene a la salida el valor representativo sin discontinuidades. Una vez definidos los parámetros se procedió a trabajar en el proceso del controlador.
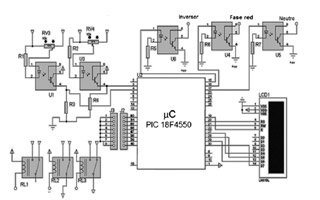
El controlador se implementó en un microcontrolador de gama alta (PIC 18F4550) y se utilizó el software de programación CCS. Como entradas se tomaron las medidas obtenidas del panel y batería, estas medidas se hicieron a través de un divisor de tensión y datos medidos suministrados por los optoacopladores como se muestra en la Fig. 9. Este divisor se ha calibrado de tal manera que cuando el voltaje de sus terminales sea el máximo en el medio obtengamos el voltaje límite con el cual la salida del optoacoplador responde a variaciones en la entrada. Como podemos ver los optoacopladores U4, U5 y U6 cumplen el objetivo de proteger y aislar el circuito de control de la etapa de potencia conformada por los dispositivos de conmutación (relés) los cuales reflejan en la salida la decisión del controlador.
Los relés en su estado normalmente cerrados reflejan en la salida la entrada de la red eléctrica. Cuando el controlador tome como decisión el suministro de energía la red eléctrica convencional, este tendrá que informar al inversor para que deshabilité los MOSFET.
En la Figura 9 se puede observar el circuito diseñado en el software de simulación electrónica Proteus. El circuito implementado físicamente, posee un sistema para la visualización y supervisión del sistema.
En el inversor desarrollado bajo la técnica de modulación PWM optimizada empleando el método directo, se diseño una modulación con np=12 consiguiendo buenos resultados en cuanto a disminución de armónicos.
Figura 10. Señal PWM optimizada con NP =12.
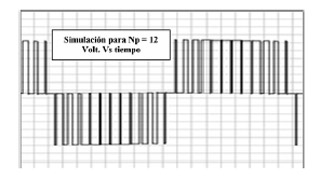 |
Figura 9. Diagrama esquemático para el circuito del controlador.
 |
En la Figura 10 se observa la simulación de la señal PWM optimizada con np = 12. Esta simulación fue desarrollada en el software de simulación electrónica Proteus. Una vez realizado el diseño se procedió a la implementación física del circuito, obteniendo como resultado una salida como la que se muestra en la Figura 11.
Figura 11. Salida del inversor con un Np=3.
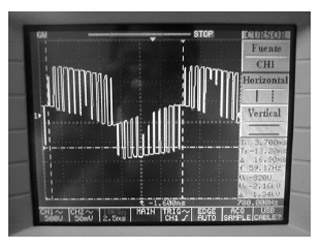 |
En esta imagen (figura 11) se evidencia la salida del sistema en su funcionamiento real, esta señal es obtenida a traves de la medida de un osciloscopio, aquí se evidencia la correspondencia con el diseño y frecuencia nominal de red. Las pruebas y validaciones se realizaron con la conexión de una carga de 300 Watts de potencia, permitiendio corroborar como tal el éxito del desarrollo de este trabajo.
5. CONCLUSIONES
– Se desarrolló el cálculo para un inversor con topología transformador de toma media para un Np=1, Np=3 y Np=12. De los cuales se implemento con Np=12. Debido a que sistema con Np=1 la señal tendría muchos armónicos.
El diseño implementado fue el Np=12, sería el adecuado, ya que este garantizaría mejores resultados en la disminución de armónicos. Para la implementación de este diseño se utilizaron dispositivos optoacopladores de alta velocidad de respuesta, para evitar solapamientos en los pulsos de conmutación; para de esta forma garantizar un óptimo funcionamiento del inversor. Como dispositivos de conmutación se utilizaron MOSFET de canal n y de enriquecimiento, con un método de modulación directo optimizado obteniendo una señal a la salida de 110v AC a 60 Hz para una entrada de 12V DC.
– La lógica difusa toma gran importancia en la representación de respuestas ambiguas de sistemas reales, presenta su principal aplicación en los sistemas de control difuso. Gracias a la flexibilidad que se tiene para interpretar a partir de esta el razonamiento humano basado en reglas; permiten mejorar, solucionar y facilitar la forma de representación de modelos matemáticos más complejos.
– En base a los resultados obtenidos, es posible concluir que la técnica de control difuso no solo es eficiente para sistemas no lineales y de difícil modelado matemático, también es eficiente para sistemas sencillos como el implementado en este trabajo, el cual presenta como salida una señal tipo singleton presentando una gran fiabilidad y robustez.
REFERENCIAS
[1] Mohd, A.; Ortjohann, E.; Schmelter, A.; Hamsic, N.; Morton, D., “Challenges in integrating distributed Energy storage systems into future smart grid,” Industrial Electronics, 2008. ISIE 2008. IEEE International Symposium, Junio 30 2008-Julio 2 2008
[2] Salvadori F., Gehrke C.S., Campos M., Sausen P. S., Oliveira A. C. “A Hybrid Network Architecture Applied to Smart Grid”, International Journal of Computing and Network Technology, Int. J. Com. Net. Tech. 1, No. 1, 45-59 (2013)
[3] Kurohane, K.; Senjyu, T.; Yona, A.; Urasaki, N.; Goya, T.; Funabashi, T., “A Hybrid Smart AC/DC Power System,” Smart Grid, IEEE Transactions on , vol.1, no.2, pp.199,204, Sept. 2010
[4] Chenlo F., Abella M. “Inversores para conexión de sistemas fotovoltaicos a la red eléctrica.” en Era solar: Energías renovables 115, España, 2003, pp. 18-33.
[5] Cáceres M., Busso A., Cadena C., Vera L., “Determinación de la eficiencia de conversión del inversos empleado en un sistema de generación fotovoltaica conectado a la red instalado en el nordeste argentino” en Avances en Energías Renovables y Medio Ambiente Vol. 12, Argentina, 2011, pp. 4.17-4.24.
[6] Morales, G. “Introducción a la lógica difusa.” Cinvestav-IPN, México, 2002.
[7] Garcés Pedro. “Analisis y control de convertidores continua- continua para módulos reguladores de baja tensión”
Universitat Rovira I Virgili.
[8] Timothy J. M., “Electrónica industrial. Dispositivos y sistemas”. Primera edición, Prentice Hall, 2006.
[9] Pardo A. y Díaz J. L. “Aplicaciones de los convertidores de frecuencia. Estrategias PWM.” Universidad de Pamplona,
Editorial JAVA E.U., Colombia, 2004.
[10] Gallardo, J. “Diseño e implementación de un control escalar para un convertidor de frecuencia trifásico utilizando modulación PWM regular, optimizado para el dsp 56f801”, Trabajo fin de carrera. Universidad de Pamplona, Pamplona, 2006.
[11] del Rio; Martin, Bonifacio; Sanz Molina, Alfredo. Redes neuronales y sistemas difusos. Addison, Wesley Iberoamericana. Estados Unidos. 2002.
[12] DNegri, C. E., & De Vito, E. L. (2006). Introducción al razonamiento aproximado: Lógica Difusa. Revista Argentina de medicina respiratoria, 14, 128-130.
[13] Moreno Velo, Francisco José. “Un entorno de desarrollo para sistemas de inferencia complejos basados en lógica difusa.” 2013
[14] R.R. Yager y D.P. Filev. “Essentials of fuzzy modeling and control”, John Wiley, 1994.
[15] L. Reznik. “Fuzzy controllers”. Newnes, 1998.
[16] Alberto Pedro Lorandi Medina Controladores PID y Controladores Difusos, Revista de Ingeniería Industrial Vol 5 N° 1, 2011.
[17] Caicedo, E., J.A. Lopez y M.A. Muñoz, Control Inteligente, Universidad del Valle, 2009.
Por: Kelvin de Jesús Beleño Sáenz, Julie Stephany Berrío Pérez,
Aldo Pardo García, Oscar Eduardo Gualdrón Guerero.
Fuente: Dialnet
VER ARCHIVO DE ARTÍCULO